Soft but Shape-Locked: A New Perspective on Adaptive Morphology Drones
Multistable composite grids enable new design methods for lightweight reconfigurable multirotor drones
Researchers at the Environmental Robotics Lab (ERL) and the Composite Materials and Adaptive Structures (CMAS) Lab at ETH Zürich have jointly developed a new design approach for soft, lightweight, and reconfigurable drones. The work, recently published in Wiley's journal Advanced Intelligent Systems, showcases the fruitful synergy between ERL’s expertise in adaptive morphology drones and CMAS’s decades of experience in lightweight composite adaptive structures.
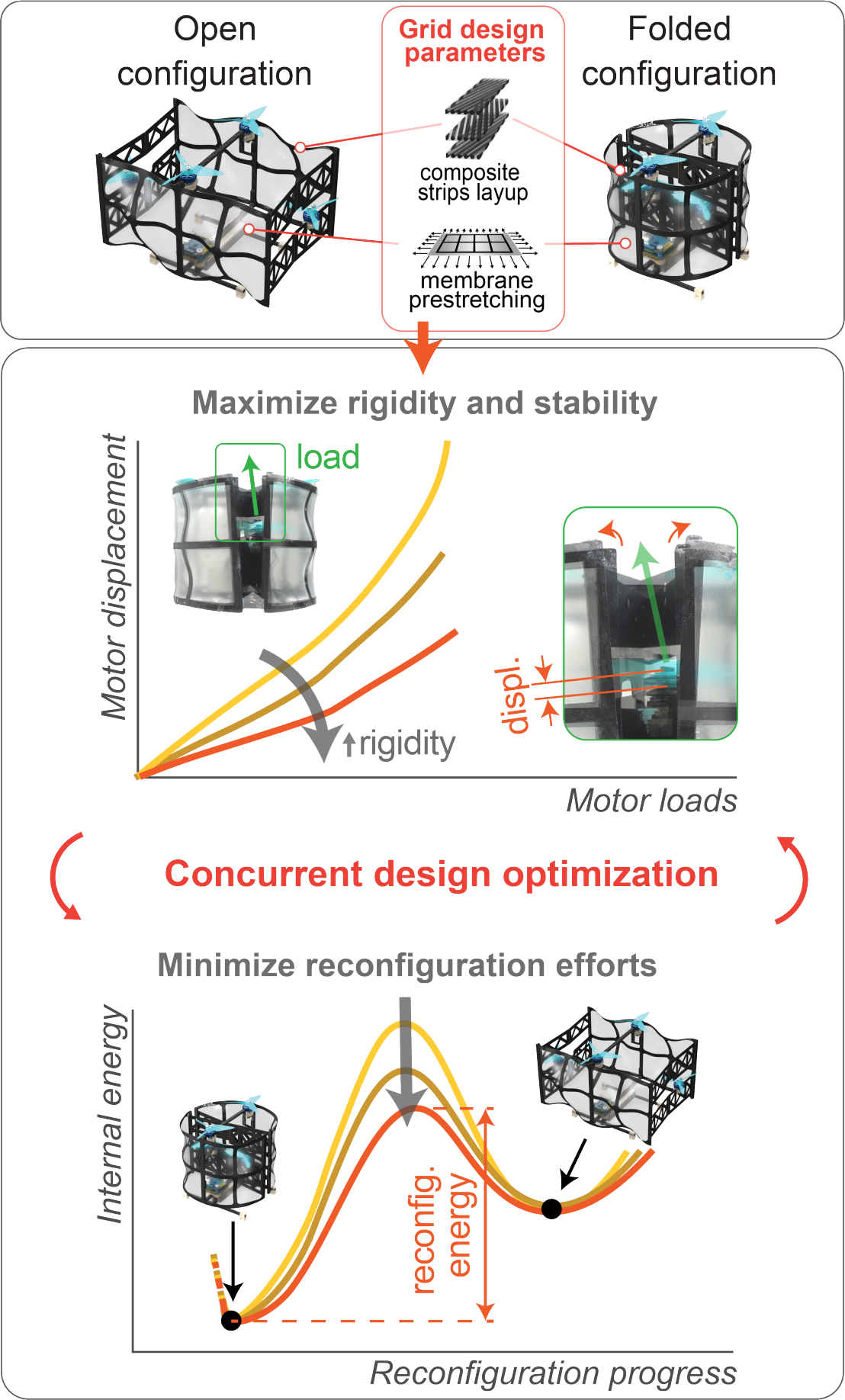
As aerial robotics increasingly demands smaller and lighter systems without compromising versatility or multifunctionality, adaptive morphology drones are progressively adopting soft airframes that draw inspiration from biological fliers. However, these soft-bodied drones must react quickly to changes in the surroundings while enduring substantial flight loads — a challenge that makes "locking" the desired flight shapes particularly complex with flexible bodies. This work's innovation lies in using soft, multistable composite grids to create lightweight airframes that self-lock into stable configurations during flight and reconfigure with minimal energy on the ground.
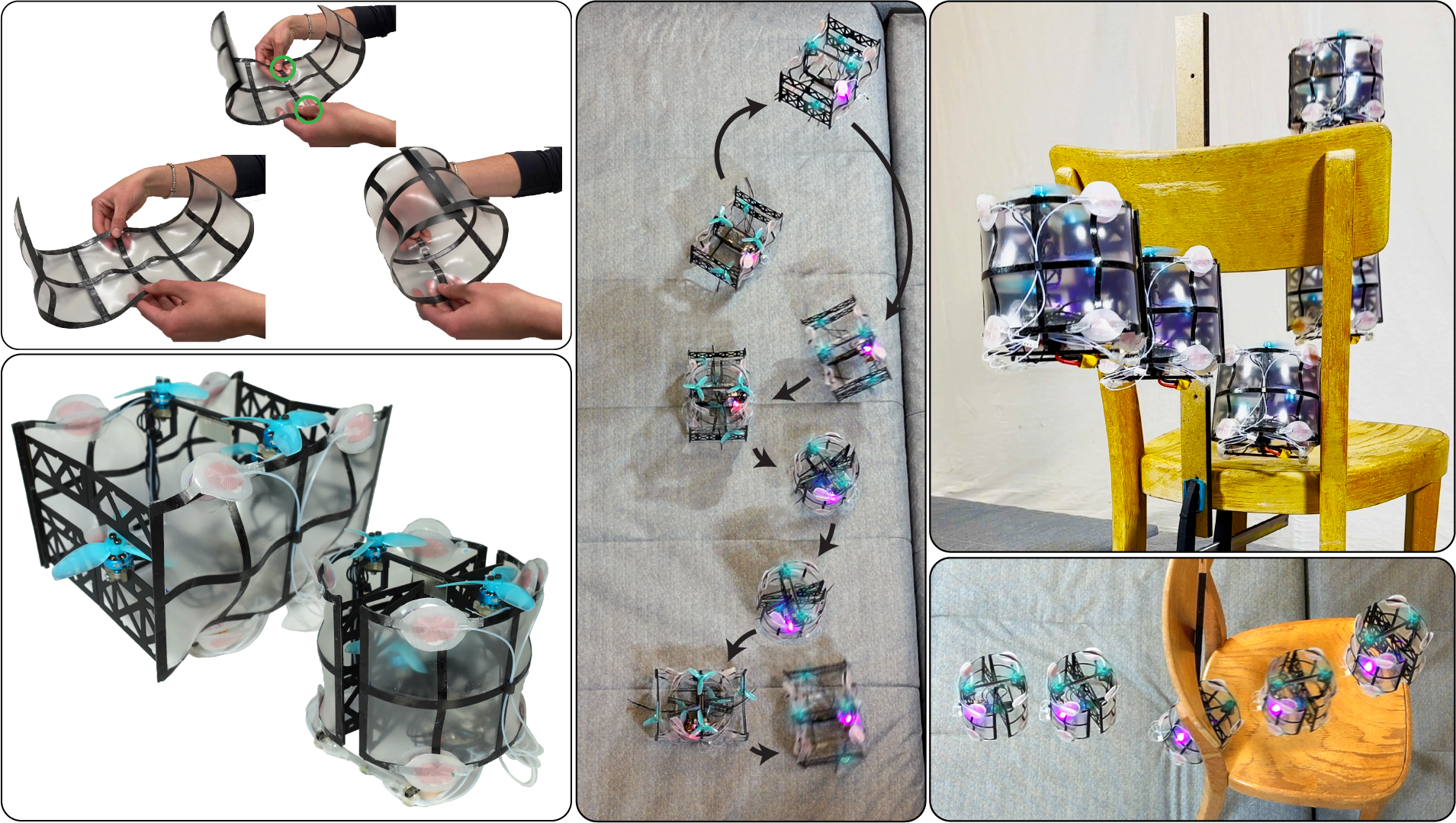
To showcase the potential of this novel design method, the researchers developed a lightweight, reconfigurable quadrotor drone weighing just 130 grams that can fold and unfold with ease—shrinking its wingspan by 48% and modulating its flight properties based on its morphology—without sacrificing its morphological and flight stability. Soft pneumatic actuators "snap" specific nodes of the multistable grids, which trigger the coordinated folding and unfolding of the entire structure.
Aided by computational analyses, the researchers optimized the airframe's design parameters hitting the ideal balance between morphological stability under flight loads and minimal effort for reconfiguration when folding and unfolding. The final design demonstrated stable, controllable flight in both configurations, successfully navigating through gaps almost as narrow as its folded width while withstanding physical contact with obstacles. Moreover, the drone completed a fully remote-controlled sequence of flight and on-ground reconfiguration across all states.
The design approach introduced in this work allows encoding wide reconfigurations of the drone's propeller arrangements directly in the stable states of a multistable airframe, thus offering a novel framework for future designs of adaptive morphology drones. By adjusting the number of cells or modifying the anisotropy distribution of the composite grids, the approach provides potentially limitless morphological combinations for new adaptive morphology drones with enhanced functional capabilities, which are easily scalable to take-off weights below 100 grams.
Read the full open-access article online at external page doi.org/10.1002/aisy.202400356.