SquAshy
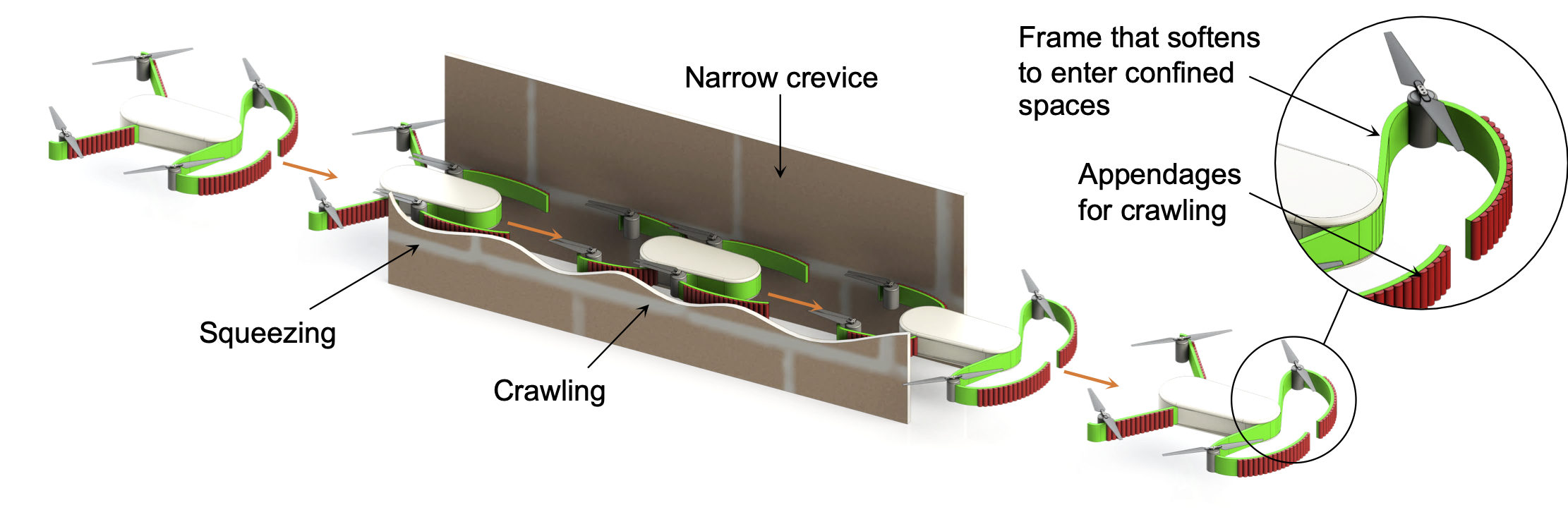
Drones are in the focus of intense research efforts aimed at developing machines able to access remote or hazardous sites. Nevertheless, drones are still restrained from exploring confined spaces like crevices or narrow gaps in natural and artificial environments. Drones are indeed conceived to fly in open areas minimizing physical interactions with their surroundings. With SquAshy we want to challenge this status quo and study drones that are forced to interact with the environment. We will do this by addressing a challenging question: how to develop a drone that can squeeze and crawl to traverse crevices?