CYbER
Forests cover approximately 30% of the Earth’s surface and are crucial, high-impact regions for the welfare of human society due to their importance for biodiversity, climate regulation and ecological balance. However, forest canopies are restraining from exploration because of their physical properties: they reach heights of 20-60 meters above the ground and are often shielded by leaves and an intricate network of branches. For this reason, the understanding, sustainable exploitation and management of forest canopies has been constantly slowed down by a very simple challenge: how to access and collect data from such an impenetrable habitat with adequate spatial and temporal resolution? And this challenge is becoming even more critical today, due to the disruption of canopy functions caused by climate changes, land-use competition, invasive species and wildfires.
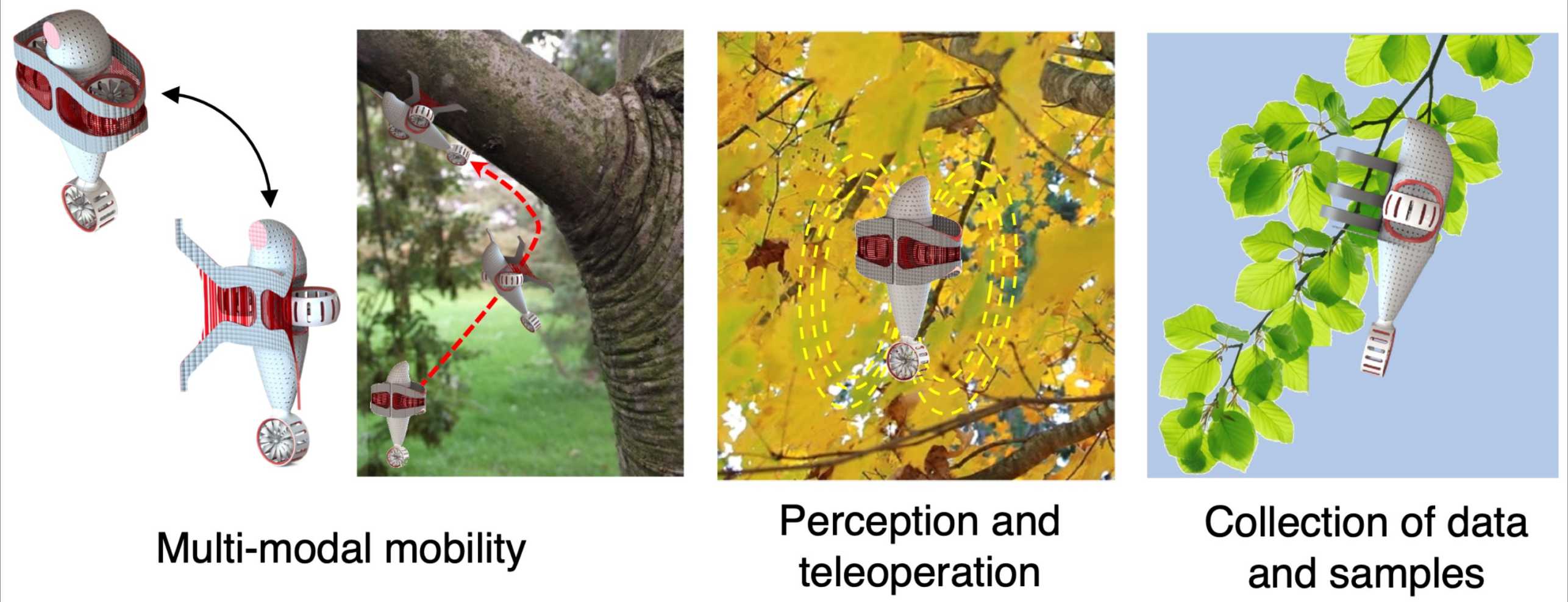
In the CYbER (CanopY Exploration Robots) project we study the science and technology of new multi-modal robots for comprehensive canopy exploration. The goal is to develop semiautonomous robots to navigate within forest canopies, and to collect images and biological samples at different spatial and temporal scales. In doing so, we will address key scientific questions on multi-modal locomotion, perception and soft manipulation necessary to interact with complex natural environments.